全景視覺系統
[雙光譜融合廣角視覺系統]
功能說明
熱紅外、微光雙光譜深像素級融合,通過實時無縫圖像凝視拼接技術,滿足多光譜、大廣角、遠距離觀測需求,結合邊緣計算智能硬件獲得目標檢測、分類、跟蹤能力,相比以往極大提高動態態勢感知能力。廣泛應用于輔助駕駛、偵查監視、要地安防等領域。
特點參數
雙光融合廣角視覺系統水平視場120°,采用同軸雙光譜像素級融合專利技術,實現全景深、高實時單像素級配準精度,典型人體識別距離超過100m。具備良好的夜視能力和透雨霧效果。
[主被動融合廣角視覺系統]
功能說明
通過熱紅外、微光、激光雷達三光譜融合,同步獲取溫度場、可見光紋理、激光三維點云復合信息,實現多光譜融合、主被動復合、高實時性凝視全景拼接,相比以往獲取更豐富的空間信息感知。在船舶智能駕駛,船岸協同感知等復雜場景全面感知、方面極具潛力。
特點參數
主被動融合廣角視覺系統水平視場為120°,廣角紅外微光雙光相機全景深融合成像,遠程高分辨率特種激光雷達,最遠探測距離500m。

[360°凝視雙光譜融合全景系統]
功能說明
三組紅外、微光雙光譜像素級融合廣角視覺系統拼接,構成360°全景系統。實現周界場景全面動態態勢感知,可應用于特種裝備環視透視成像和要地安防全景感知中。與增穩光電云臺配合,適應移動平臺姿態起伏與搖擺,可用于船舶全景智能瞭望系統。
特點參數
360°凝視全視場成像,全景深、高實時單像素級配準精度,典型人體識別距離超過150m。具備良好的夜視能力和透雨霧效果。
多目多光譜新體制融合感知雷達系統
[船載詳查雷達系統]
功能說明
船載詳查雷達系統由激光雷達、雙光譜融合廣角相機和高精度光電增穩云臺構成,國內首套應用于拖船,用于空間信息智能感知與船舶關鍵部位精細識別。激光三維點云與雙光譜圖像主被動相融合,全面感知被測目標溫度場、可見光紋理和三維形貌信息。可用于關鍵要地安防或船舶、車輛等移動平臺上實現自主導航、車路船岸協同、威脅目標捕獲跟蹤等多種場景中。
特點參數
具有廣角大場景感知、豐富信息獲取、作用距離更遠、識別率更高等優點。120°廣角紅外/微光雙光相機全景深融合成像,遠程高分辨率特種激光雷達,探測距離500m,輕型高精度光電增穩云臺抵抗平臺顛簸搖擺(船舶橫搖±15°,縱搖±12°的條件下保證0.02°的指向精度)。
[多目超分辨成像和立體視覺系統]
功能說明
通過多目視覺硬件配置,基于計算光學中多目超分辨成像和多目立體視覺算法,達到利用軟件提升多光譜光學系統成像效果的目的。由此可以達到紅外微光雙光融合,更高分辨率和更好煙霧透霧能力的視覺增強效果,獲取目標三維形貌信息等優點。在大特關鍵場景安防、軌道交通行車安全輔助駕駛系統、車路協同中的路端道路傳感器等。
特點參數
多目超分辨成像和立體視覺系統以融合更豐富信息(熱、可見紋理、譜、三維信息)、更清晰成像能力、超越晝夜和天氣限制為特點。其中雙光譜雙目立體視覺系統,視場分為40°×30°和20°×15°兩種配置,人員識別距離對應為150m和300m。立體視距在50m遠程測距精度達到±3%,10m近程成像精度可以達到毫米級。
遠程預警、跟蹤與識別系統
[雷視融合激光雷達光電系統]
功能說明
雷視融合激光雷達光電系統以高性能激光雷達為主體加之微光視覺系統,形成主被動融合光電系統,微光視覺系統由一部廣角微光相機和一部長焦微光相機構成。適合于大場景中有精細三維目標識別和高精度位姿解算的應用場合。此外又極具經濟性,在機器視覺、智慧交通、智慧碼頭、智慧場站等領域應用潛力巨大。
特點參數
特種激光雷達以高分辨率著稱,解決了以往稀疏點云難以識別的小尺度精細目標,適合于精細化場景應用中。高性能激光雷達擁有作用距離遠(500m),廣角水平視場為120°,空間分辨率高(0.01°× 0.01°)和測距精度高(±2cm)等卓越性能。廣角微光相機水平視場超過100°,長焦微光相機2°~50°調焦變倍,高分辨率成像。

[軌道交通行車安全輔助預警系統]
功能說明
機車行車安全輔助預警系統分為遠程熱紅外成像、微光成像,近程雙光融合成像,激光測距和GPS/北斗定位,通過多傳感器數據融合,多維信息實時計算分析,實現列車運行、作業期間對軌道前方入侵人員、牲畜、車輛等危險因素智能識別預警。輕軌、地鐵輔助預警系統由雙目雙光融合相機構成,除獲取目標可見紋理和溫度信息外,還能獲取目標的距離和三維形貌信息,精準識別前方人、落石等異物入侵目標并進行預警。
特點參數
機車輔助預警系統在國內軌道交通領域首次實現全天候、公里級的機車輔助實時預警。輕軌、地鐵輔助預警系統工作距離超過百米,具有全天候、更準確、更可靠、更實用、高性價比等優勢。
[云臺式多光譜遠程觀測跟蹤系統]
功能說明
多光譜智能輕載云臺是集成紅外熱成像、高清可見光、激光補光成像和高精度云臺于一體的遠程觀測跟蹤產品,支持光學透霧、光學防抖、支持火點和區域入侵等智能功能,可有效提升在夜晚和惡劣天氣下的目標識別準確率。適用于鐵路周界防范、航道監測、港口靠離泊遠程感知以及森林草原煙火監測等場景。
特點參數
針對鐵路周界防范預警系統實現3Km鐵路沿線區域覆蓋,預警準確率高于95%,對鐵路沿線及周界區域人員入侵實現全天候監控和預警。
[船載光電增穩跟蹤球機]
功能說明
紅外和可見光雙光譜融合成像與高精度光電穩臺結合,應用在船載、車載移動平臺上,通過高精度光電穩臺抵抗平臺起伏搖擺,實現對目標的連續穩定跟蹤和觀測。
特點參數
光電增穩跟蹤球機具有高達0.01°的指向精度,具有良好的高動態跟蹤特性,增穩模式水平和俯仰最大轉速大于 200°/s,水上針對典型拖船目標識別距離超過3km。
可穿戴融合視覺系統
[可穿戴融合傳感器和智能頭盔]
功能說明
集成熱紅外、微光可見光、激光甲烷遙測傳感器、環境氣體傳感器等多維感知于一體,實現工業現場智能讀表,設備異常溫度探查,易燃易爆氣體遙測,硫化氫、一氧化碳、氧氣等危害關鍵氣體檢測等功能。融合嵌入至帶有融合現實功能的智能頭盔中,多維傳感器信息顯示至AR眼鏡上,增強巡檢人員感知力和理解力,打造“超級工人”。
特點參數
可穿戴型多維感知傳感器具有輕小型、低功耗等優點,內部集成AI芯片呈現出更清晰視覺增強和更智能化目標檢測,以微小的身形靈活嵌入到智能頭盔中。紅外微光雙光譜工作距離和激光甲烷遙測儀工作距離超過20m。
[可穿戴融合感知和自主定位系統]
功能說明
將熱紅外、微光可見光、IMU、環境氣體傳感器等多維感知融合,在火災等惡劣現環境下穿透煙火實現火點偵測、人員探查、現場溫度場感知、一氧化碳和氧氣等環境氣體探測、人體生命體征感知等,并通過雙光譜融合視覺和IMU結合實現在無基站條件下室內人員自主導航定位。結合人機交互裝置或融合現實裝置,幫助消防應急人員應對惡劣場景下的環境感知和最佳路線規劃。
特點參數
以輕小型化、低功耗、雙光譜融合為特色,具備復雜現場穿煙透霧視距擴展能力,紅外測溫精度達±2℃@5m,融合視場37°×28°,輸出圖像分辨率1280×960。基于融合視覺和IMU的無基站條件下室內自主導航定位精度優于5‰,測速精度優于0.3m/s,滿足一般中精度室內定位需求。
“煙火溫氣”融合智能視覺系統
[圖像型“煙火溫氣”復合探測系統]
功能說明
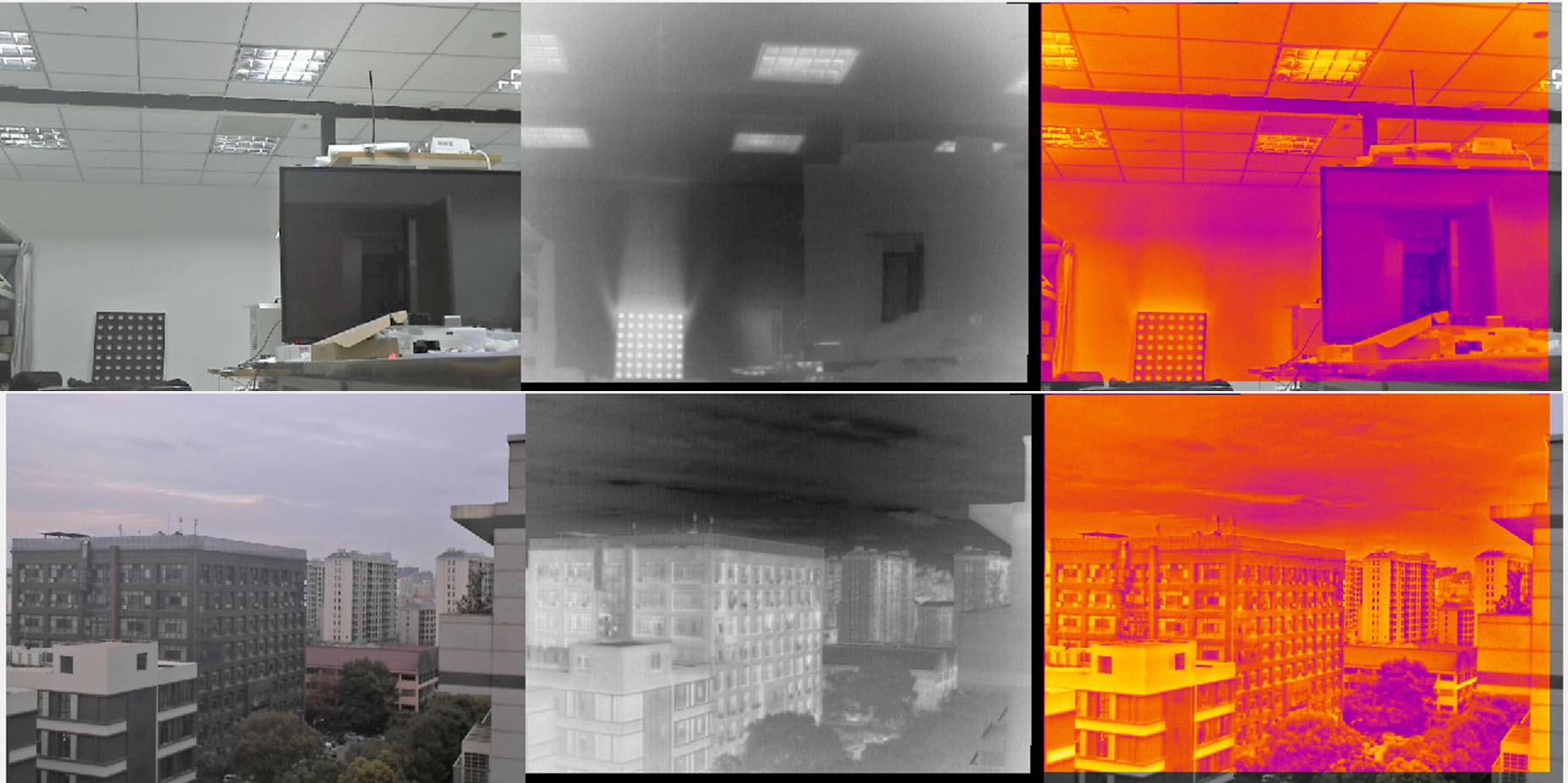
圖像型“煙火溫氣”復合探測系統集成了紅外熱像儀、微光相機、紅外補光、邊緣計算單元等,是集異常溫度監測、煙/火偵測、氣體泄漏監測(與背景存在溫差)等多重功能于一體的安全監測智能系統。集成了火焰識別、煙霧識別、異常溫度識別標記、氣云泄漏等智能算法,普遍應用于石油、天然氣、危化、煤礦、電力等高危場景。
特點參數
相比于傳統煙火探測器和熱像儀,圖像型“煙火溫氣”復合探測系統實現了全要素高集成化安全監測,解決高危特種場所安全監測的“早期預警、響應及時、多元復合、覆蓋全面”的固有難題。根據不同應用場景,產品形式分為常規性和防爆型,根據探測距離,探測系統分為50m近程圖像探測器和100m的遠程圖像探測兩種。
[VOCs紅外氣云智能成像儀]
功能說明
紅外氣云成像儀基于氣體在紅外吸收光譜的“指紋”特征,采用紅外成像技術實現危險區域中氣體泄漏的成像檢測,經圖像增強處理和AI技術實現泄漏氣體的自主識別和預警。制冷型紅外熱成像與高清視頻融合快速確認VOCs氣體泄漏擴散趨勢并定位泄漏源。同時具備氣體泄漏監測、煙火檢測、工業測溫、常規安防等多種功能。
特點參數
紅外氣云成像儀采用兩萬小時以上長壽命制冷型紅外成像技術;探明VOCS氣體微量泄漏,針對甲烷探測靈敏度達到100ppm.m(ΔT = 4℃);準確溯源定位泄漏點,氣云形態可視,煙跡方向辨識;秒級實時發現,實時分析;觀測范圍廣,數百米級觀測半徑;自主智能化,無人值守。
[激光氣云成像雷達]
功能說明
激光氣云成像雷達是在激光甲烷遙測儀的基礎上,增加激光雷達高速掃描機構,實現了針對泄漏甲烷氣云的成像。相比于傳統云臺式遙測儀,解決了甲烷泄漏的可視化、泄漏點定位、泄漏規模和態勢評估等問題。
特點參數
激光氣云成像雷達與防爆云臺結合可實現360°水平角度和90°俯仰角度巡航,可連續掃描工作也可停止于預置點針對重點部位凝視成像。探測距離為100m,圖像幀頻0.25Hz,視場約10°×10°。

 融合感知智能視覺技術與產品
融合感知智能視覺技術與產品